|
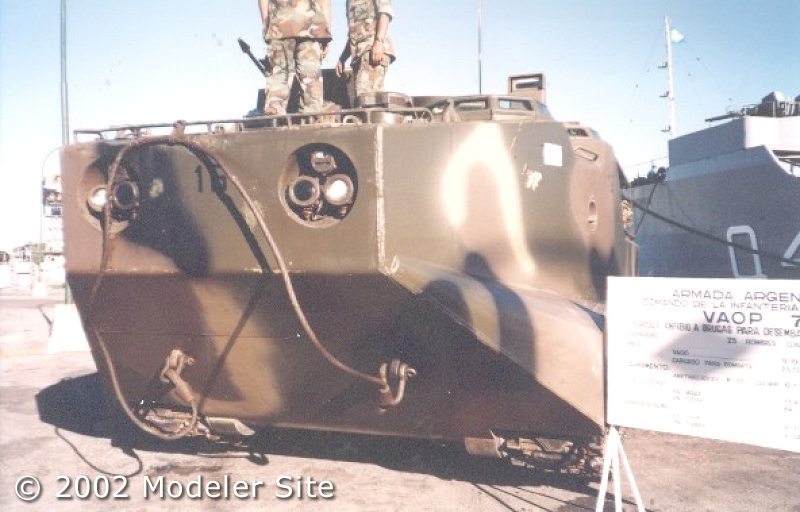
This is an amphibious radio controlled LVTP-7 in 1/35 scale, which can navigate and land on the coast by itself.
The normalized assault amphibious vehicle of the US Marine Corps during the fifties, was the LVTP-5 (Landing Vehicle Tracked Personal - 5). Although improved if compared to the first vehicles, this LVTP - 5 proved to be inefficient to be kept in service, so in 1964 the U.S. Marine Corps requested to the FMC Corporation the construction of 17 prototypes. Finally, in 1967, the LVTPX - 12 was accepted.
The developments took place in Alaska, Panama and other bases of the navy and after some operative tests, a contract was signed for the construction of 942 units, which were finally delivered between August 1971 and September 1974.
Ever since, they have formed part of the U. S. Marine Corps, which currently uses an improved version: the assault amphibious vehicle AAV 7 A1.
|
The basic version has been exported to several countries like Argentina, South Korea, Spain, Italy, Thailand and Venezuela.
The most important technical features of the LVTP - 7 are: its hull produced with aluminum of different thickness, with a weight of 22,83 tons and 7,943 meters long, 3,263 mts height and 3,270 mts width. It is powered by a Detroit 8V-53T diesel engine that reaches up to 400 HP with which the tracks are set in motion at a maximum speed of 64 km/hours on the surface.
For its propulsion in the water at 13,5 km/hour it uses two hydro-jets located on each side of the rear part of the hull, although if necessary its tracks could propel the vehicle at 7 km/hour in the water.
Its transportation capacity is 4.350 kilos and it can transport 25 marines plus three members of the crew.
Suspension is through torsion bars and is composed by six double wheels with a front sprocket wheel and one idler wheel on the rear part.
Its internal fuel reserve allows for a 500-km autonomy, as well as 7-hour autonomy in the water.
The basic armament is composed of an armored turret carrying a 12,70 mm Browning machine gun.
The LVTP - 7 in Argentina
This vehicle is closely related to the N° 1 BATTALION OF AMPHIBIOUS VEHICLES created on December 27, 1947. It is originally organized as a company composed of "Carriers Universal T16" tanks.
|
In March of the following year this battalion incorporated the amphibious tracked vehicles (ATV) purchased from USA.
In 1971, due to the need to update its amphibious capacity, the Argentine Navy purchased 15 VARC 5 units and later, in 1973 and 1974, other 21 LVTP 7 units, best known as ATVs (Amphibious Tracked Vehicles), were incorporated.
On December 12, 1978, the unit took part in the Austral Operation theater at the Isla Grande de Tierra del Fuego, during the course of the conflict generated with Chile for the Beagle Channel.
But the most successful participation of the unit and the argentine LVTP 7 vehicles was during the conflict on the Malvinas Islands on April 2 1982, at 06-30 hs, where they took part in the Rosario Operation, when the first LVTP 7 vehicles touched the Malvinas/Falklands lands.
During the advance towards the city, the LVTP 7 05, 07 and 09 were reached by the intense enemy fire without consequences for the personnel. Having contributed to achieve the goals of the landing force, they reorganized during the afternoon and re embarked on the following day on the LCT ARA Cabo San Antonio towards the continent.
Currently, the Project Direction of the Argentine Navy is planning to update these LVTP 7 since their useful life has been successfully completed.
|
The LVTP - 7 dynamic model
In 1996 during an open exhibition made by the Argentine Navy at the Puerto Belgrano base, I had the chance to see this vehicle in operation. I was captivated by its ability to move on the surface as well as in the water, for which reason I took some pictures during the static exhibition, with the idea of studying the possibility of building a model of this vehicle.
But only in the year 2000 did I purchase a Tamiya LVTP - 7 kit and made the first tests on the mechanisms to be installed in order to achieve a good performance.
I will try to explain in this review what I did, so that you can put your kit in motion if you want.
The mechanisms
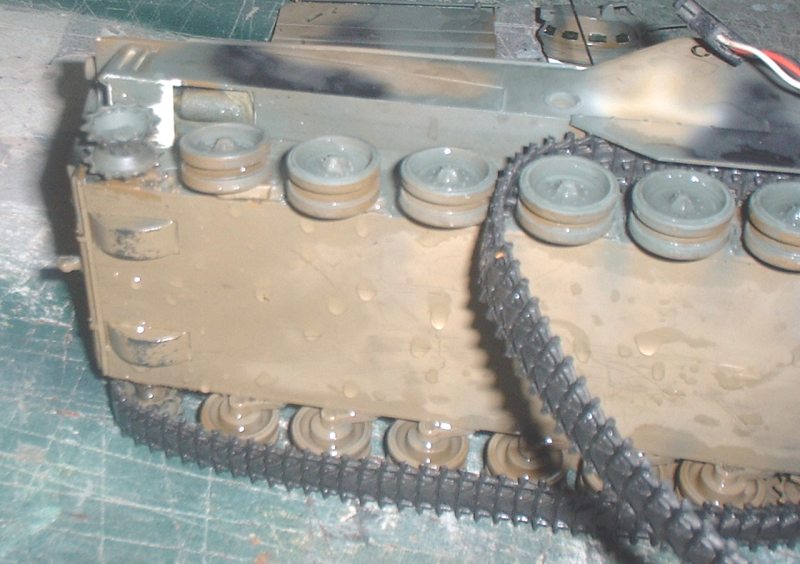
The first thing I did was to study the way to install the hydro-jets. I had to modify the kit, by trimming the area where the turbine is located.
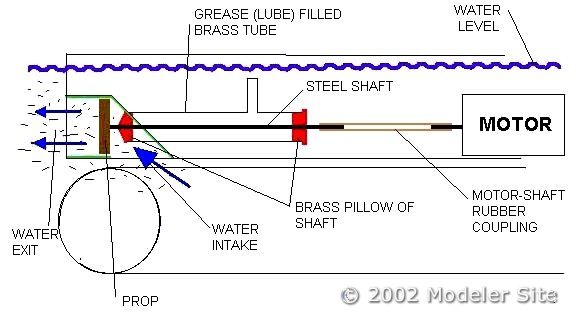
I used two propellers borrowed from a Heller Arromanches aircraft carrier kit. The system to mount the transmission was produced with the typical bronze tube with hubs produced with the same material, the axis is a 1-mm. steel rod.
This tube will be filled with grease in order to avoid the entrance of water into the hull. On drawing Nº 1 you can see its shape and the assembly. Obviously, I produced two of these assemblies, one for each hydro-jet. The insertion of these systems to the engine was achieved by means of a rubber tube.
|
|
|
Diagram 1
|
Other important aspects reviewed during this stage were the general maximum weights, and types and position of engines. The room inside the hull allows for the easy insertion of these elements. In addition I tried to make this hull completely water-sealed. I used some pieces of plastic melted with thinner, and with the resulting paste I covered all holes.
A modeler friend of mine, Andrés Hollmann, helped me make the hydro-jets function by radiocontrol, since he had already built an Abrams tank having a similar performance.
I made use of his advice and experience to transform the electronic circuits of the servos (servo controls belonging to the radio control equipment).
Now I can control each one separately, I can go forwards, backwards and combine the turning way of each hydro-jet. I can turn to the left and to the right.
The motorized tracks
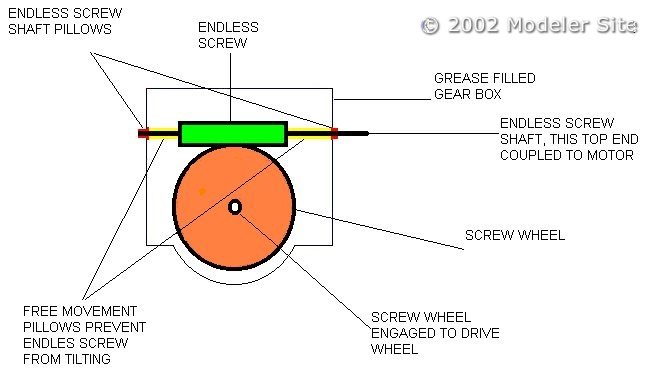
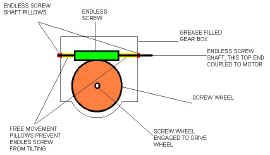
Using as a reference the tracks used by Trumpeter in their kits, I found out how to transmit the power of the engines to the tracks. This company uses a gear reducing couple for the engine, and an endless and a crown wheel for the transmission to the sprocket wheels.
I just used the endless and the crown to transmit the movement to the wheel, since the gear reducing couple limited its speed and took too much space.
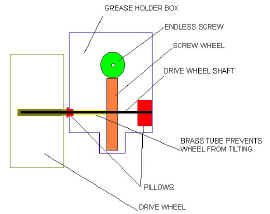
I also made the transmission of both tracks independent from each other, therefore, I had to install 2 crowns and 2 endless. Another modification introduced was to insert the sprocket wheel on the rear part of the vehicle, unlike the original vehicle which features them on the front area. I used some parts from Trumpeter, like for example the sprocket wheel.
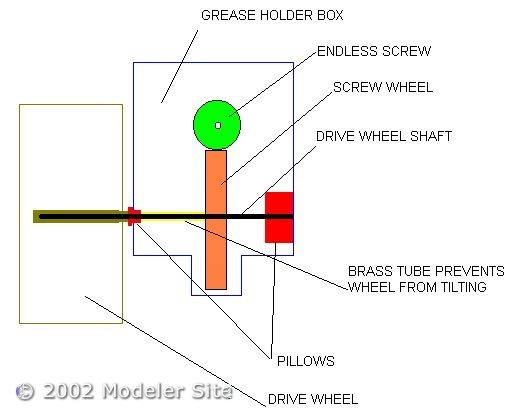
The hubs and the box that contains the grease to avoid the passage of water were produced with bronze and plastic. On drawings Nº 2 and 3 you can find a drawing of the assembly.
|
|
|
Diagram 2
|
Diagram 3
|
The hardest task was to avoid the axial movement of the endless and the crown, for which reason I added a bronze tube on the axis of the endless, between this and the hub of the box, on the front and rear areas. The problem here is that when the model is set in motion either forwards or backwards, the endless would move, thus losing transmission.
The same thing happened with the axis of the crown, but in this case I just inserted the bras tube between the crown and the hub on the side of the sprocket wheel.
|
I used four 6-volt Robbe engines, since they could supply the necessary power and revolutions to set the model in motion. In addition, they did not produce any "noise" that could cause interference on the radio-receptor.
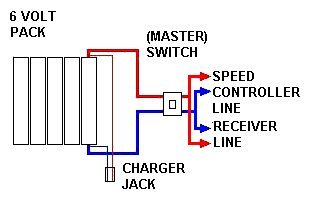
These engines were powered by a 6-volt pack, which also served to power the receptor and the servos.
This pack is composed of 600 mA type AAA batteries from Ni-MH. See drawing Nº 4.
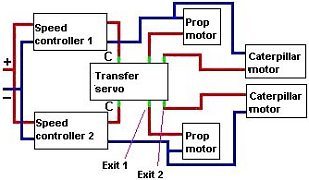
For the transfer of each one of the engine assemblies (two engines for the tracks and two engines for the hydro-jets), I used a third channel to which I modified the electronics of the servo. See drawing Nº 5
|
|
|
Diagram 4
|
|
|
|
Diagram 5
|
Finishing model
I translated all this experience to an Academy's LVTP-7 kit, which is the model incorporated by the Argentine Navy, which was painted with its particular camouflage. The tests took place at the "Lago de Regatas" in the city of Buenos Aires. Fortunately, the day was not windy at all for which reason I was able to make several landings without being far away from the coast.
I could also make a landing from a World War II LCT 731, at the same scale, which belonged to one of the members of the "Club Argentino de Modelismo Naval a Escala" (CAMNE), in the middle of the water.
Conclusion
This model really made me very happy because it is the first amphibious vehicle to operate with these features.
All questions from people interested in this model will be welcome.
|